
Planetary Lander Email List
Mission Statement
Summary
This project aims to compete in the FOGE Battle of the Rockets Planetary Lander competition. In accordance with competition specifications, this project will develop and design a ‘planetary lander’ that will fit inside a rocket. This rocket will be launched to a minimum of 1000 ft, deploy and land the lander safely. Once on the ground, the lander will upright itself autonomously and use sensors to collect various data. Throughout the launch and for 15 minutes after landing, this data will be sent back in real time to a ground station.
- BoR System Requirements
- Lander: Requirements include:
- Must weigh less than 1 kg
- Completely contained within rocket during launch
- Operates autonomously
- No remote control except for camera movement
- Cannot free fall
- No pyrotechnics
- No Lipo batteries
- Only 1 XBee allowed for transmission of data
- XBee cannot broadcast
- Telemetry is transmitted at a rate of no more than once per second
- Transmits data for at least 15 minutes after landing
- Must upright itself within 5 minutes of landing
- Rocket
- Must reach at least 1000 ft
- Motor cannot exceed 1280 N-s of thrust
- Must use a motor retainer
- Ground Station
- Must display telemetry in real time
- Must display images received
- Must operate only on battery power
- Must be portable
- Antenna must be hand held
- Must count number of data packets received
- Lander: Requirements include:
- Team-Determined Goals
- During the competition extra points will be awarded for plotting telemetry data on the ground station in real time and for transmission of GPS location and color images, especially if a 360 degree panoramic image can be generated. The team plans to pursue these goals for extra points. Extra points are also awarded for solar powered operations, but the team has not yet decided whether to attempt this.
- Design
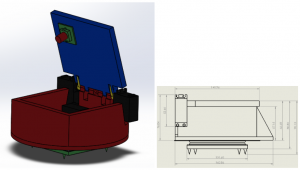
- Figure 3.1: Lander Mechanical : Figure 3.1 shows the preliminary SOLIDWORKS design of our lander and its uprighting mechanism. The design is such that the lander is biased to land on its lid, which will then open with the assistance of 2 servo motors, flipping itself into an upright position. The lander and lid will be 3-D printed and connected together by a simple hinge.
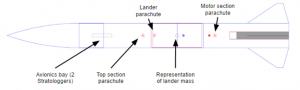
- Figure 3.2: Launch Vehicle : Figure 3.2 shows the rocket, which is designed around the lander. Currently the design involves a 7.5” OD blue tube airframe. It is overall 80” long and is designed such that the lander will fit concentrically within the coupler tube. There will be 4 fins made of fiberglass, and the stability is currently 1.23 cal.
- Ground Station : The ground station will consist of a Raspberry Pi 3 interpreting the data received by an XBee, with an integrated wire antenna. The GUI will be a website accessible through the WiFi of the Pi by any mobile device, including cell phones.
- Lander Electronics : Electronics include a 9V battery as a power supply, a fast-blow fuse, and a voltage divider. A 5V rail will power the servos for the lid, the servo controlling the camera, and the camera itself. A 3.3V rail will power a light sensor, an environment sensor, a GPS, an orientation sensor, and an Arduino Teensy 3.6, which is sending data to the TX XBee.
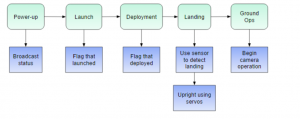
- Figure 3.5: Software : Figure 3.5 shows the main process the software will go through. Prototyping software for sensors will be written in Arduino IDE and tested using mock environments, mock sensor interactions, and mock transmission of data.
- Timeline
