Vertical Takeoff and Landing

Delta VTOL Email List
Mission Statement
The goal of this project is to design build and fly a fully functioning remote-control vertical takeoff and landing, “VTOL,” aircraft. This aircraft will take off vertically in a multirotor configuration then convert to forward flight using a fixed wing configuration. This aircraft will also be able to fly autonomously to GPS waypoints using the onboard flight computer. We will have this fully functioning by the end of the semester.
Background
Multirotors can take off and land in a very small space but they are very inefficient in forward flight. Fixed wing aircraft, on the other hand, are very efficient in forward flight, but need a large area for takeoff and landing. By combining both a multirotor and a fixed wing aircraft, it is possible to have an aircraft that can take off and land in a small space and also be efficient in forward flight.
Although this sounds difficult to achieve, with my experience in building RC aircraft, I have no doubts we can achieve our goal. I have built both RC multirotors and RC fixed wing aircraft from the ground up, so this is very obtainable.
Design
The most critical part of this project is being able to mix both aircraft types from an electronics standpoint. There is an open source flight computer called Pixhawk which can be setup to handle VTOL aircraft. Not only does this flight computer manage the transition between fixed wing and multirotor configurations, but it also adds autonomous functions to the aircraft such as waypoint navigation which is really cool.

The airframe will be built off the RV Jet kit which is a proven design for stability and ability to carry a decent payload. It needs to be able to carry the extra weight of the multirotor setup which is not normally part of the build.

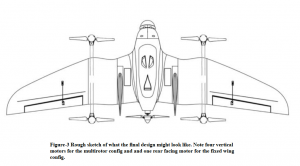
The multirotor platform will then be built into the airframe with a standard boom style construction. We can design and 3d print mounts that can be epoxied into the foam of the wing of the aircraft to fixture the multirotor booms.
The rest of the build would consist of wiring and configuring the electronics then testing. Hovering could be tested right on campus, but the forward flight would need to be tested in a larger park or preferably a field outside of the city.

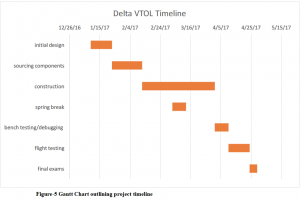
Timeline
As stated before, the end goal of this project is to get the aircraft fully functional by the end of the semester. Figure-5 outlines the general timeline of the project.